- TELECENTRIC LENSES 1.1''Telecentric Lens



FALenses Technology will be your best partner
Product naming
Naming rule: LS XXMXXXXXK Example: TC1.5x65A118(D16)
TC 1.5X 65 A 118 (D16)
TC Lens type (TC: coaxial TL: non-coaxial)
1.5X Lens magnification
65 Working distance
A Product serialization
118 Camera chip
(D16) Bracket appended suffix (lens front outer diameter size)
1.1''Telecentric Lens Specifications
| Specifications | |||||||||||
| Bi-telecentric lens | |||||||||||
| Model | FOV (φmm) |
Mag β(x) |
WD(mm) | F.NO | NA | Telecentricity | Distortion typical | Resolution (μm) |
DOF (mm) |
Mount | Detector |
| BTL0.007X408N1.1 | 224.03 | 0.007 | 408 | 5 | 0.008 | <0.05° | <0.03% | 34.20 | 37.82 | C | 1.1" |
| BTL0.078X410V1.1 | 237 | 0.078 | 410 | 5 | 0.008 | <0.10 | <0.1% | 33.77 | 36.85 | C | 1.1" |
| BTL0.11X318V1.1 | 168 | 0.11 | 318 | 5 | 0.011 | <0.1° | <0.1% | 23.94 | 18.53 | C | 1.1" |
| BTL0.125X301V1.1 | 148 | 0.125 | 301 | 5 | 0.013 | <0.1° | <0.1% | 21.07 | 14.35 | C | 1.1" |
| BTL0.138X288V1.1 | 134 | 0.138 | 288 | 5 | 0.014 | <0.10 | <0.1% | 19.08 | 11.77 | C | 1.1" |
| BTL0.168X247N1.1 | 102.68 | 0.168 | 247 | 6.5 | 0.013 | <0.035° | <0.015% | 20.38 | 10.32 | C | 1.1" |
| BTL0.168X251V1.1 | 110 | 0.168 | 251 | 5 | 0.017 | <0.10 | <0.1% | 15.68 | 7.94 | C | 1.1" |
| BTL0.25X230R1.1 | 69.00 | 0.25 | 230 | 6 | 0.021 | <0.05° | <0.03% | 12.64 | 4.30 | C | 1.1" |
| BTL0.201X254V1.1 | 92 | 0.201 | 254 | 8 | 0.013 | <0.1° | <0.1% | 20.96 | 8.88 | C | 1.1" |
| BTL0.23X185N1.1(15um) | 75.00 | 0.23 | 185 | 10 | 0.012 | <0.05° | <0.03% | 22.90 | 8.47 | C | 1.1" |
| BTL0.233X229V1.1 | 79 | 0.233 | 229 | 8 | 0.015 | <0.10 | <0.1% | 18.09 | 6.60 | C | 1.1" |
| BTL0.334X138V1.1 | 55 | 0.334 | 138 | 6 | 0.028 | <0.1° | <0.1% | 9.46 | 2.41 | C | 1.1" |
| BTL0.516X111V1.1 | 36 | 0.516 | 111 | 8 | 0.032 | <0.1° | <0.1% | 8.17 | 1.34 | C | 1.1" |
| BTL0.72X72V1.1 | 26 | 0.72 | 72 | 9.8 | 0.037 | <0.10 | <0.1% | 7.17 | 0.84 | C | 1.1" |
| BTL0.345X185N1.1(10um) | 50.00 | 0.345 | 185 | 12 | 0.014 | <0.050 | <0.03% | 18.32 | 4.52 | C | 1.1" |
| BTL0.389X128V1.1 | 48 | 0.389 | 128 | 6.8 | 0.029 | <0.1° | <0.1% | 9.21 | 2.01 | C | 1.1" |
| BTL0.444X119V1.1 | 42 | 0.444 | 119 | 8 | 0.028 | <0.1° | <0.1% | 9.49 | 1.82 | C | 1.1" |
| BTL0.26X178V1.1 | 71 | 0.26 | 178 | 5.5 | 0.021 | <0.1° | <0.1% | 12.76 | 4.18 | C | 1.1" |
| BTL0.275X200R1.1 | 62.73 | 0.275 | 200 | 6 | 0.023 | <0.05° | <0.03% | 11.49 | 3.55 | C | 1.1" |
| BTL0.292X159V1.1 | 63 | 0.292 | 159 | 5 | 0.029 | <0.10 | <0.1% | 9.02 | 2.63 | C | 1.1" |
| BTL0.293X187V1.1 | 63 | 0.293 | 187 | 8.5 | 0.017 | <0.1° | <0.1% | 15.28 | 4.44 | C | 1.1" |
| Telecentric lens | |||||||||||
| Model | FOV (φmm) |
Mag β(x) |
WD(mm) | F.NO | NA | Telecentricity | Distortion typical | Resolution (μm) |
DOF (mm) |
Mount | Detector |
| TC0.345X220T1.1 | 51.04 | 0.345 | 220 | 7.5 | 0.020 | <0.07° | <0.05% | 15 | 5 | C | 1.1" |
| TC0.25X150B1.1 | 69.00 | 0.25 | 150 | 8 | 0.016 | <0.05° | <0.03% | 16.86 | 5.74 | C | 1.1" |
| TL0.32X185B1.1 | 53.91 | 0.32 | 185 | 10 | 0.016 | <0.05° | <0.04% | 16.46 | 4.38 | C | 1.1" |
| TC0.31X150B1.1 | 55.65 | 0.31 | 150 | 8 | 0.019 | <0.08° | <0.05% | 13.59 | 3.73 | C | 1.1" |
| TC0.37X150B1.1 | 46.62 | 0.37 | 150 | 8 | 0.023 | <0.05° | <0.05% | 11.39 | 2.62 | C | 1.1" |
| TL0.36X150N1.1 | 47.92 | 0.36 | 150 | 9 | 0.020 | <0.1° | <0.07% | 13.17 | 3.11 | C | 1.1" |
| TL0.455X110N1.1 | 37.91 | 0.455 | 110 | 9 | 0.025 | <0.1° | <0.05% | 10.42 | 1.95 | C | 1.1" |
| TL0.52X110R1.1 | 33.17 | 0.52 | 110 | 6 | 0.043 | <0.03° | <0.05% | 6.08 | 0.99 | C | 1.1" |
| TL0.6X185B1.1 | 28.75 | 0.6 | 185 | 10 | 0.030 | <0.050 | <0.04% | 8.78 | 1.24 | C | 1.1" |
| TL0.6X110N1.1 | 28.75 | 0.6 | 110 | 6.5 | 0.046 | <0.10 | <0.02% | 5.71 | 0.81 | C | 1.1" |
| TL1X110R1.1 | 17.25 | 1 | 110 | 7 | 0.071 | <0.030 | <0.03% | 3.69 | 0.31 | C | 1.1" |
| TC3X65N1.1(D44) | 5.75 | 3 | 65 | 9.5 | 0.158 | <0.15° | <0.05% | 1.67 | 0.04 | C | 1.1" |
| TL3X65N1.1(D44) | 5.75 | 3 | 65 | 9.5 | 0.158 | <0.15° | <0.05% | 1.67 | 0.04 | C | 1.1" |
| TC4X65N1.1(D44) | 4.31 | 4 | 65 | 12 | 0.167 | <0.15° | <0.05% | 1.58 | 0.03 | C | 1.1" |
| TL4X65N1.1(D44) | 4.31 | 4 | 65 | 12 | 0.167 | <0.15° | <0.05% | 1.58 | 0.03 | C | 1.1" |
| TL0.3X138N1.1 | 57.50 | 0.3 | 138 | 8 | 0.019 | <0.05° | <0.05% | 13.80 | 3.98 | C | 1.1" |
| TC0.8X110N1.1 | 22.00 | 0.8 | 110 | 7.5 | 0.053 | <0.1° | <0.05% | 5.20 | 0.53 | C | 1.1" |
| TL0.8X110N1.1 | 22.00 | 0.8 | 110 | 7.5 | 0.053 | <0.1° | <0.05% | 5.20 | 0.53 | C | 1.1" |
| TC1X110N1.1 | 17.60 | 1 | 110 | 10 | 0.050 | <0.1° | <0.05% | 5.00 | 0.44 | C | 1.1" |
| TL1X110N1.1 | 17.60 | 1 | 110 | 10 | 0.050 | <0.1° | <0.05% | 5.00 | 0.44 | C | 1.1" |
| TC1.5X110N1.1 | 11.73 | 1.5 | 110 | 11.5 | 0.065 | <0.10 | <0.05% | 3.90 | 0.25 | C | 1.1" |
| TL1.5X110N1.1 | 11.73 | 1.5 | 110 | 11.5 | 0.065 | <0.1° | <0.05% | 3.90 | 0.25 | C | 1.1" |
Telecentric lenses are a type of optical lens designed to provide parallel rays of light to the camera sensor or object plane. Unlike conventional lenses, which emit converging or diverging rays, telecentric lenses produce collimated light rays, meaning that the chief rays are parallel to the optical axis. This characteristic makes telecentric lenses particularly useful in applications requiring accurate measurements, such as machine vision, metrology, and quality control.
The key features of telecentric lenses include:
-
Constant Magnification: Telecentric lenses maintain a constant magnification across the entire field of view, regardless of the object's distance from the lens. This ensures accurate and consistent measurements.
-
Elimination of Perspective Error: By ensuring that the chief rays are parallel to the optical axis, telecentric lenses minimize perspective error, which can distort measurements, especially in applications where depth information is critical.
-
Shadow-Free Imaging: Telecentric lenses produce shadow-free images because they illuminate objects from all directions with parallel rays of light. This is particularly advantageous in applications where precise edge detection is necessary.
-
Depth of Field Control: Telecentric lenses offer precise control over the depth of field, allowing users to focus on specific object features while maintaining sharpness throughout the image.
Overall, telecentric lenses are valued for their ability to provide accurate and repeatable measurements, making them essential components in various industrial and scientific applications where precision is paramount.
Concepts of Lens Parameters
|
Resolution (LP/MM) Refers to the number of distinguishable black and white stripes within a 1mm range on the image side. Resolution is expressed in line pairs per millimeter (lp/mm). For example, 100lp/mm means that the distinguishable spacing between black and white stripes is 1/100mm (10um). The width of each black and white stripe is 1/200mm (5um). |
Focal Length f(mm), Back Focal Length/Front Focal Length The focal length refers to the distance between the optical system's center and its focus point. The back focal length is the distance from the vertex of the last lens element to the back focal point, while the front focal length is the distance from the vertex of the first lens element to the front focal point. |
|
Chromatic Aberration: In optical lenses, the magnification of the image can vary based on the wavelength of light, leading to differences in where the image is formed. This variation is called chromatic aberration. Chromatic aberration along the optical axis is referred to as axial chromatic aberration, while chromatic aberration occurring off-axis is called lateral chromatic aberration or magnification chromatic aberration. |
Effective F# This value represents the effective brightness of a lens at a given finite distance, indicating the brightness during actual operation. As the optical magnification (β) increases, the lens becomes darker. The effective F-number (Effective F#) is calculated as V(2×NA) = 1/(2×NA), and Effective F# = (1+β) × Standard F#. |
|
Floating Mechanism: This system is designed to compensate for image aberrations that occur during close-up photography. When a lens is moved (extended) for close-up shots or to adjust object distance, aberrations can vary depending on magnification or shooting distance, sometimes leading to a drop in sharpness. A floating mechanism minimizes the aberrations caused by moving the lens in varying shooting conditions, thereby correcting these aberrations. |
Depth of Focus(DOF) Depth of focus is the distance between the nearest and farthest points where the image remains acceptably sharp as the sensor moves back and forth from the optimal focus point. Unlike depth of field, which is a parameter on the object side, depth of focus is a parameter on the image side of the optical system. |
|
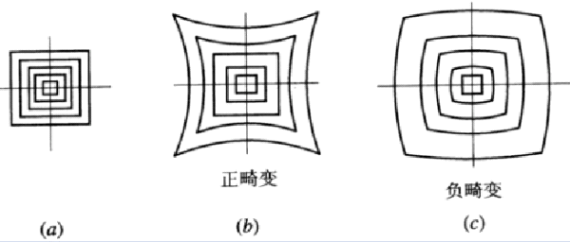
Distortion (%): Distortion is the phenomenon where straight lines appear bent when imaging off-axis points. When straight lines bend inward toward the center, it's known as pincushion distortion. When they bend outward, it's called barrel distortion. |
Telecentric Optical System A telecentric optical system is one where the chief rays are parallel to the optical axis. If the light from the object traveling toward the lens remains parallel to the optical axis, even off-axis, it's called an object-side telecentric system. If the light traveling from the lens toward the image remains parallel to the optical axis, even off-axis, it's known as an image-side telecentric system. |
|
Depth of Field (DoF) Depth of Field is the distance between the nearest and farthest points where the image remains acceptably sharp as the object moves toward or away from the optimal imaging distance. Depth of Field is influenced by factors like the lens's effective F-number, the circle of confusion diameter, and the optical magnification (β). The circle of confusion is the diameter of a blur circle that represents an acceptable level of sharpness. A common standard for an acceptable circle of confusion diameter is 0.04mm. |
Resolution (μm) Resolution is a measurement of the minimum distance between two points before they are no longer distinguishable. For example, a resolution of 1 μm means that two points separated by 1 μm can be resolved. The resolution values in this context refer to the theoretical resolution of a lens. Below is the formula used to calculate the theoretical resolution based on the diffraction limit for an aberration-free lens.
where λ is the design wavelength, typically 550 nm, and NA is the numerical aperture of the lens. |
|
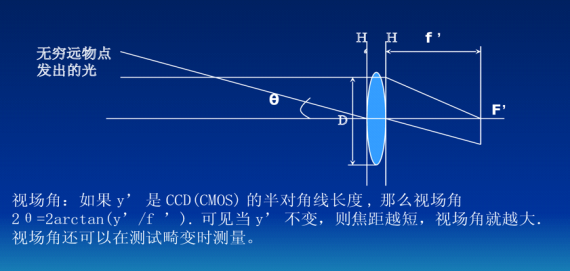
Field of View (mm) Field of view refers to the size of the object that can be captured when the lens is mounted on a camera. The field of view is determined by the sensor size divided by the optical magnification (β). (Example Calculation) If the optical magnification is 0.2x and the camera sensor size is 1/2" (4.8mm length, 6.4mm width): Field of view length = 4.8 / 0.2 = 24 (mm) Field of view width = 6.4 / 0.2 = 32 (mm) |
Working Distance (WD) (mm) Working distance is the distance from the bottom surface of the lens to the object being inspected. |
|
Back Focal Distance (mm) Back focal distance is the distance from the front edge of the lens mount flange to the image plane. |
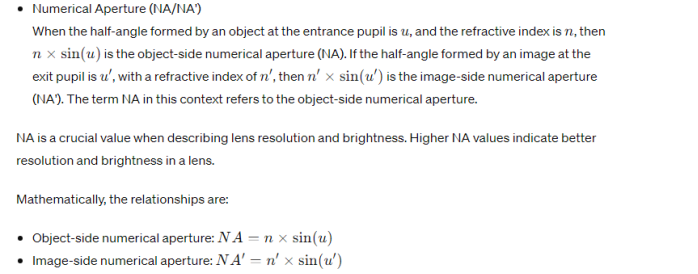
Numerical apertureNA/NA'
|
|
C-Mount Specifications · Name: C-Mount · Standard Outer Diameter: 25.400 mm · Thread Pitch: 32 threads per 25.4 mm · Back Focal Distance: 17.526 mm C-Mount is a standard specification for lens mounts used in cameras and other optical systems. It is characterized by a specific outer diameter, thread pitch, and back focal distance, facilitating compatibility among various lenses and cameras designed with this specification. |
F.NO (F-Number) This parameter represents the light-gathering capability of a lens. It is calculated by dividing the focal length of the lens by the diameter of the entrance pupil D. It can also be derived through the optical magnification from the lens's numerical aperture (NA). A smaller F-number indicates a brighter image. The formula to calculate F-number is: F# = \frac{{f}}{{D}} Where f is the focal length, and D is the diameter of the entrance pupil. |
|
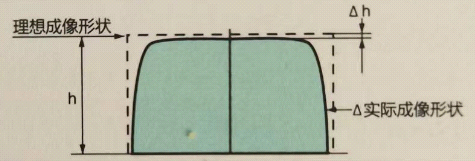
TV Distortion (%) TV distortion refers to the distortion in the vertical direction of a TV screen (chip). A lower value indicates better performance, ideally approaching zero. TV distortion (%) is calculated as: \text{TV distortion (%) = (Distortion Depth/Screen Height) × 100} Where "Distortion Depth" refers to the curvature deviation along the longer edge, and "Screen Height" is the perpendicular measurement of the display.
|
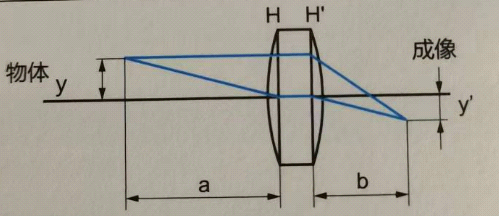
Optical magnification (β)
|